Introdução
O Núcleo de Tecnologia Assistiva (NTA/UFES - “Núcleo Nascente”) do Programa de Pós-Graduação em Engenharia Elétrica (PPGEE) da Universidade Federal do Espírito Santo (UFES) é coordenado pelo Prof. Dr. Teodiano Freire Bastos Filho e composto pela professora Eliete Maria de Oliveira Caldeira e pelos professores doutores Anselmo Frizera Neto e André Ferreira. Há ainda 20 alunos de doutorado e 9 de mestrado (tanto do PPGEE quando do Programa de Pós-Graduação em Biotecnologia – PPGBiotec) que também fazem parte do grupo, além de estudantes do Doutorado RENORBIO (Rede Nordeste de Biotecnologia).
O núcleo realiza, desde 1997, pesquisas sobre sistemas, equipamentos, dispositivos e interfaces de ajuda a pessoas com deficiência. As pesquisas que vêm sendo desenvolvidas no NTA/UFES se encaixam nas seguintes áreas:
Órteses e próteses
Em 1999, após o desenvolvimento de sensores mioelétricos no ano de 1997, foi desenvolvida a primeira prótese multisensorial de membro superior do Brasil (Fig. 1), com ampla divulgação científica na época, em congressos nacionais e internacionais. A prótese desenvolvida possui as seguintes características:
• Uso de microcontrolador PIC para comando da eletrônica de acionamento da mão artificial, com base nos seguintes sensores:
a. Mioelétrico;
b. Temperatura (sensores KTY e rede de linearização);
c. Força e Deslizamento (sensores FSR);
d. Nível de Bateria (rede de resistores);

• O microcontrolador efetua o controle da seguinte forma: Se a temperatura estiver acima de 45oC, o usuário é alertado (por vibradores). Se a temperatura estiver acima de 60oC, o controlador não permite o fechamento da mão artificial. Se o objeto começar a deslizar ao ser levantado pela mão artificial, o controlador exerce mais força sobre o objeto até que ele deixe de deslizar.
Auxílios para qualificação da habilidade visual e recursos que ampliam a informação para pessoas com baixa visão ou cegas
Nos anos de 2002 e 2003 foram desenvolvidos dois sistemas de ajuda à mobilidade de pessoas com baixa visão ou cegas, avaliados positivamente em testes realizados por voluntários cegos do “Instituto Luiz Braille do Espírito Santo”. Os dispositivos possuem as seguintes características:
• Pochete Ultrassônica para Deficientes Visuais (Fig. 2a), com as seguintes características:
a. Permite detecção de obstáculos até a altura do tórax;
b. Opera com bateria recarregável;
c. Utiliza dois vibradores para alertar sobre a existência de obstáculos próximos;
• Colete Ultrassônico (Fig. 2b), com as seguintes características:
a. Permite a detecção de obstáculo até a altura da cabeça;
b. Eletrônica reduzida;
c. Opera com bateria recarregável;
d. Utiliza dois vibradores para alertar sobre a existência de obstáculos próximos;


Auxílios para a vida diária e prática
Ainda no ano 2004, foi desenvolvido um dispositivo de comunicação entre deficientes visuais e motoristas de ônibus, também avaliado positivamente em testes realizados por voluntários cegos do “Instituto Luiz Braille do Espírito Santo”.
O deficiente visual, ao chegar à parada de ônibus, aciona o transmissor de rádio-frequência. O motorista de ônibus saberá com antecedência (a uma distância menor do que 150 m) a existência de um deficiente visual na próxima parada de ônibus. Avaliamos que o dispositivo proporciona independência ao deficiente visual.
O dispositivo possui as seguintes características:
• Circuito baseado em microcontrolador PIC.
Auxílios para a vida diária e prática
Em 2005 começaram as pesquisas sobre processamento de sinais biomédicos aplicados a uma cadeira de rodas robótica. E no ano de 2009, o NTA desenvolveu a primeira cadeira de rodas robótica multimodal do mundo, com controlador dinâmico adaptativo (Fig. 4), capaz de seguir caminhos pré-definidos por trilhos metálicos (utilizando sensores magnéticos), ou comandada por várias modalidades: piscadas de olhos (sinais sEMG), movimento do globo ocular (VOG), movimentos de cabeça (IMU), sopro ou sucção (sensor de pressão), e até por sinais cerebrais (EEG de distintos padrões: concentração/relaxamento – ERD/ERS –, potenciais evocados visuais de estado permanente – SSVEP –, e imaginação motora). A referida cadeira de rodas foi amplamente reportada pela mídia nacional, além de divulgação em congressos nacionais e internacionais e também em periódicos científicos internacionais de primeira linha. Este sistema assistivo foi patenteado, com o título “Sistema Assistivo de Interface Homem-Máquina”, com o Número do Registro no INPI PI1006321 e data de Depósito em 20 de julho de 2010.
56

Ainda no que se refere ao sistema de ajuda à mobilidade, em 2013 o núcleo desenvolveu um andador robótico (Fig. 5) que ajuda na mobilidade de pessoas com deficiência motora leve e moderada (que podem caminhar, mas somente com auxílio). O sistema utiliza sensores de força, localizados nos apoios de antebraço, para detectar a intenção de movimento do usuário, além deum sensor laser para detectar a distância das pernas e assim inferir a velocidade de marcha do usuário.


CAA - Comunicação aumentativa e/ou alternativa
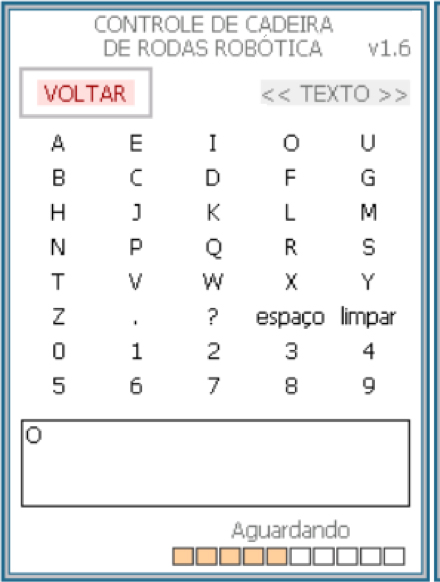
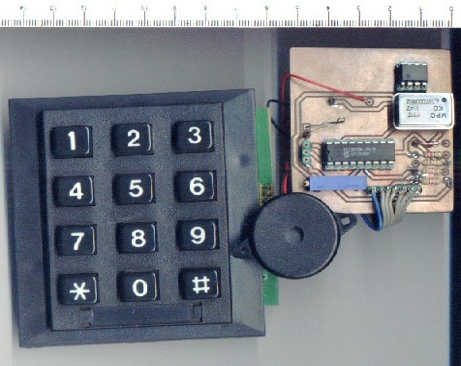
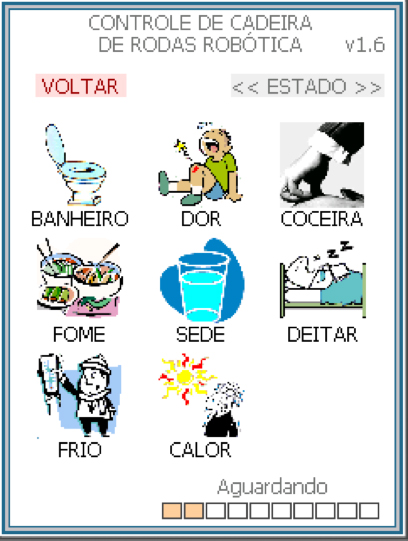
No ano 2009, desenvolvemos um sistema (instalado em um PDA localizado na cadeira de rodas robótica) (Fig. 6), que permitia ao cadeirante comunicar-se de forma alternativa, utilizando quaisquer das modalidades (piscadas de olhos, movimento do globo ocular, movimentos de cabeça, sopro ou sucção, ou sinais cerebrais) para selecionar letras do alfabeto e compor palavras e frases, utilizando um sistema preditivo, ou selecionar símbolos pictográficos associados a estados de necessidade ou sentimento. Uma vez selecionado o texto ou símbolo, um comando voz artificial é emitido através de duas caixas de som da cadeira de rodas robótica.

Robôs para interação com crianças com deficiência motora severa e autismo
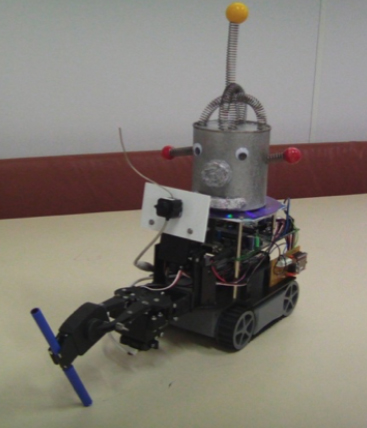
No ano de 2011 foi desenvolvido o robô móvel Nino, projetado para ser comandado por crianças com deficiências motoras severas (Fig. 7) para que estas pudessem interagir com o ambiente através do robô. Assim, as crianças podem utilizar qualquer movimento voluntário, enquanto os sensores mioelétrico (sEMG) e de inclinação (baseado em acelerômetro), localizados em partes do corpo da criança (cabeça, braço, perna, etc), capturam tanto a contração ou distensão muscular quanto a inclinação da parte do corpo onde o sensor está instalado. Esses sinais são transmitidos, sem fio (wireless) ao robô móvel, para que este realize operações de agarrar, trazer e levar objetos, ou até mesmo desenhar sobre papel.
No ano de 2014 o NTA desenvolveu um robô móvel para interação com crianças com autismo. O robô foi denominado MARIA, um acrônimo em inglês (Mobile Autonomous Robot for Interaction with Autistics) que significa “Robô Móvel Autônomo para Interação com Autistas” (Fig. 8a). O robô é dotado de sistema multimídia (monitor de vídeo e alto-falantes) que reproduz filmes infantis para atrair a atenção das crianças. Além disso, o robô possui câmera de vídeo para registrar as expressões faciais das crianças, além de um sensor laser para obter a localização da criança em cada momento. Esses sensores têm por finalidade verificar as emoções (pelas expressões faciais) e a proximidade da criança ao robô (para analisar conceitos de proximetria, os quais se referem à interação social entre a criança e o robô). Vários experimentos foram feitos com crianças com autismo (com registro de seus padrões de sinais cerebrais através de uma touca de EEG sem fios, para também determinar padrões de emoções evocados nas crianças). A finalidade desta pesquisa é utilizar o robô como intermediário para fortalecer a interação entre as crianças com autismo e as demais pessoas do seu convívio. Em 2017, foi desenvolvida uma nova versão do robô MARIA, denominada N-MARIA, ou Nova-MARIA (New MARIA, em inglês). Nesta nova versão do robô, foram incluídos um novo sensor laser (omnidirecional) e uma câmera térmica (de forma a verificar o rubor da pele da criança com autismo, associado a emoções). A face do robô também foi modificada e substituída por um tablet, capaz de representar faces dinâmicas (com movimentos de boca e olhos).
59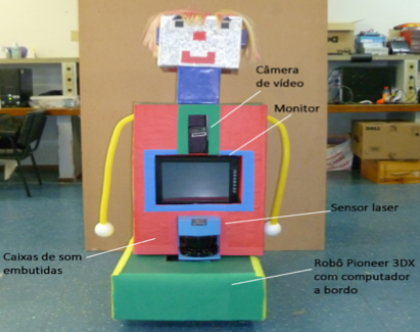

Adaptações em veículos
Desde 2013, um novo projeto de pesquisa em desenvolvimento (em conjunto com o Programa de Pós-Graduação em Informática da UFES), pretende permitir que uma pessoa com deficiência motora severa possa comandar um veículo da marca Ford, modelo Escape Hybrid, por sinais cerebrais (Fig. 9), equipado com sistemas de controle de acelerador, freio, marcha, luzes, buzina e sensores de odometria, posição do volante e rotação do motor. O veículo possui também um sistema laser LIDAR (Light Detection And Ranging), câmeras de vídeo de alta velocidade de transmissão de dados (firewire), GPS e sensor inercial 6D (IMU – Inertial Measurement Unit), os quais são utilizados para a localização do veículo e mapeamento do ambiente, através do uso de técnicas de SLAM (Simultaneous Localization and Mapping).

Reabilitação
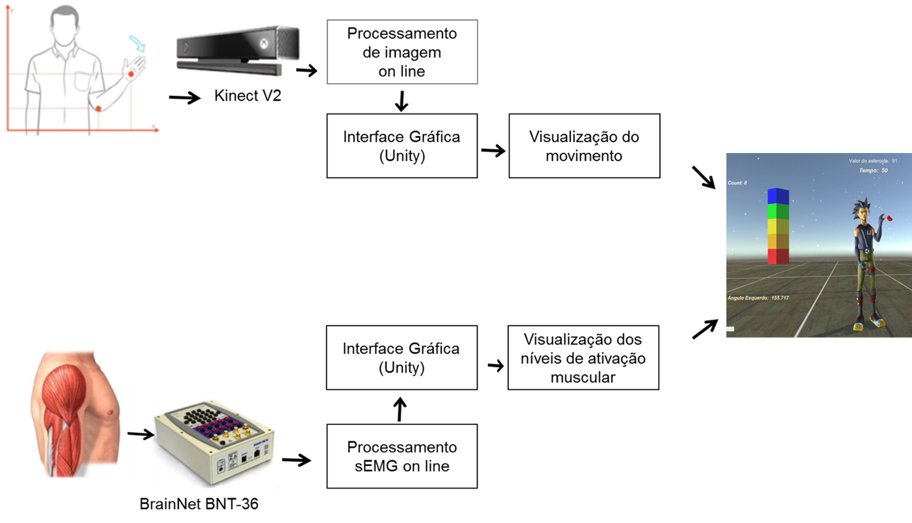
Em 2016 o NTA desenvolveu um ambiente de realidade virtual para reabilitação física de pessoas com deficiência (Fig. 10), de forma que, após treinamento com fisioterapeuta, a pessoa com deficiência possa realizar sua reabilitação em casa. Essa tecnologia utiliza novas ferramentas computacionais para o desenvolvimento de ambientes imersivos (Blender 3D, Unity, entre outros) e sensores modernos para a captura de movimento, tais como dispositivos inerciais e câmeras RGB-D (como o Microsoft Kinect). A tecnologia utiliza também um avatar para realizar os movimentos no ambiente de realidade virtual com ajustes de intensidade, sendo orientada à deficiência específica da pessoa, específica para uma tarefa e com características motivadoras, já que a realidade virtual possibilita novas formas para enriquecer os exercícios de reabilitação. Adicionalmente, este ambiente de realidade virtual é capaz de armazenar vários dados referentes à reabilitação, tais como: tipo de lesão da pessoa com deficiência, duração da sessão de reabilitação, frequência e execução dos exercícios, etc., permitindo que o fisioterapeuta possa acompanhar posteriormente todo o processo de reabilitação.
Interação com o Ambiente
Ainda no ano de 2016, desenvolvemos um ambiente assistivo (com treinamento prévio por realidade virtual), utilizando os conceitos da Domótica Assistiva, que permite que pessoas com deficiência motora severa possam, mesmo sentadas em uma cadeira de rodas ou acamadas, utilizar sinais biológicos provenientes de seus músculos (sinais mioelétricos – SME), do movimento de seus olhos (sinais eletrooculográficos – EOG – ou videooculográficos – VOG), ou do cérebro (sinais cerebrais – EEG), para controlar dispositivos eletroeletrônicos de sua residência, tais como lâmpadas, ventilador, TV, ar condicionado, rádio, etc (Fig. 11). A comunicação entre a cadeira de rodas e os dispositivos do ambiente é feita através de comunicação sem fios, utilizando sinais de rádio-frequência, infravermelho e Bluetooth, sendo que são utilizados três métodos para a interação entre a pessoa com deficiência e os dispositivos do ambiente: gestos faciais (SME), movimentos dos olhos do usuário (EOG/VOG) e sinais cerebrais (EEG). O dispositivo de aquisição de sinais biológicos (SME, EOG, VOG ou EEG) da pessoa com deficiência é um dispositivo sem fios (wireless).
61
Este texto foi elaborado pelo Prof. Teodiano, apresentando o excelente trabalho realizado pelo Núcleo por meio de sua atuação na área das Tecnologias Assistivas.
Para complementar essa discussão, apresentamos a seguir a entrevista concedida a profa Ana Bandeira, (Professora do curso de Design da Puc/Goiás, Coordenadora de Produção de material do CIAR/UFG, Pesquisadora na área de Acessibilidade, Tecnologia e Interfaces no MediaLab/UFG), sobre seu olhar para as questões que envolvem tecnologia, inclusão, acessibilidade e pesquisas da área.
Ana Bandeira
A sociedade contemporânea parece ter identificado que pessoas com deficiência são cidadãos, e tem início um processo de conversão da acessibilidade em valor para a cidadania, ao invés de obrigação. Como você enxerga esse momento?
Teodiano Freire Bastos Filho
O advento das cotas para contratação e inclusão de pessoas com deficiências no mercado de trabalho foi um marco importante, pois fez com que a sociedade notasse uma presença maior de pessoas com deficiência em vários cargos em instituições públicas e privadas, considerando-os também como cidadãos, e com direitos a ter acessos facilitados a locais de trabalho, estudo e lazer.
Ana Bandeira
Como a tecnologia auxilia pessoas com deficiência a adquirir melhor qualidade de vida?
Teodiano Freire Bastos Filho
Vejo que as novas tecnologias estão permitindo principalmente uma maior independência a essas pessoas, pois agora elas mesmas podem usar essas tecnologias para comandar suas próprias cadeiras de rodas, seus próprios equipamentos do ambiente onde vive (lâmpadas, ventilador, ar condicionado, TV e telefones celulares), sem precisar tocá-los, fazendo tudo isso sem sensores conectados a seus corpos (sensores não-intrusivos), o que também gera muita comodidade às pessoas com deficiência.
Ana Bandeira
Como está a posição do Brasil no desenvolvimento, inovação e mercado de produtos de tecnologia assistiva?
Teodiano Freire Bastos Filho
Na minha opinião, o Brasil possui grupos de pesquisa que têm gerado novos dispositivos e equipamentos para auxiliar as pessoas com deficiência, tendo posição de destaque em inovações em tecnologias assistivas.
62Ana Bandeira
O aumento de startups tem contribuído para o surgimento de novos produtos de tecnologias assistivas?
Teodiano Freire Bastos Filho
Sim, vejo novas pequenas empresas surgindo nesta área, que são as “startups” e “spin-offs”, mas ainda considero um grande desafio criá-las, pois a burocracia ainda é alta e os financiamentos para os estabelecimentos dessas empresas ainda são escassos, com juros altos.
Ana Bandeira
O que é necessário para melhorarmos o cenário nacional de tecnologias assistivas, nos âmbitos de PD&I?
Teodiano Freire Bastos Filho
Considero que é necessário utilizar, de uma forma mais ampla no Brasil, o financiamento coletivo (o chamado “crowdfunding”), de forma a viabilizar as pesquisas e também possibilitar a chegada dessas novas tecnologias assistivas às pessoas que delas necessitam.
Ana Bandeira
Qual o papel das universidades na cultura da acessibilidade?
Teodiano Freire Bastos Filho
As próprias universidades têm que cumprir a lei de acessibilidade, pois muitos prédios das universidades brasileiras possuem acessibilidade zero, ao não contarem nem mesmo com rampas ou elevadores para cadeirantes.
Ana Bandeira
Como podemos pensar em um país baseado no respeito e oportunidade para pessoas com deficiência?
Teodiano Freire Bastos Filho
Considero que já estamos melhorando a cada dia no que tange ao respeito e oportunidades às pessoas com deficiência, seja através das leis que fornecem gratuitamente próteses e cadeiras de rodas, seja por meio de gratuidade de passagem aérea ao acompanhante de pessoas com deficiência, mas penso que a acessibilidade ainda carece de atenção, principalmente nos acessos às calçadas das nossas vias públicas (todas deveriam ser do tipo “calçada cidadã”) e nos prédios (todos deveriam ter portas automáticas, rampas e elevadores para pessoas com deficiência). Isso ainda pode ser um sonho distante, mas outros países já conseguiram: o Canadá é um exemplo a ser seguido!